



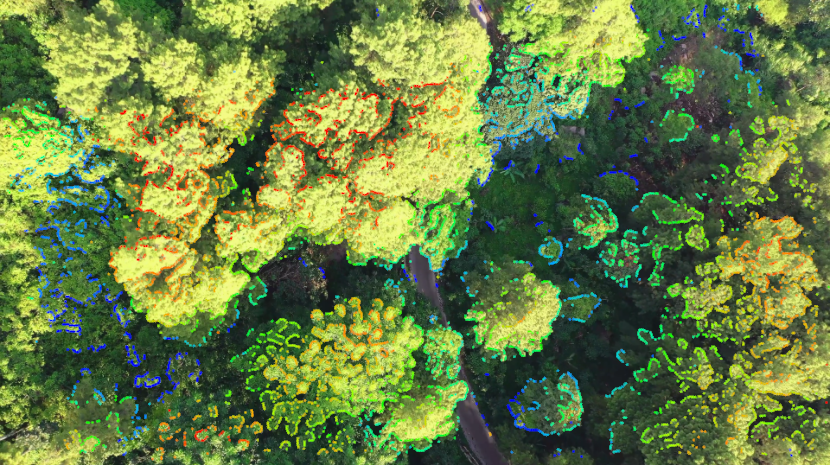
Figure 3.22: Sub pixel accuracy edges.
Edge pixels have a large gradient magnitude in some direction. Thus, they usually form connected components along gray level edges in an image, e.g. along roads or roofs. Non-maximum suppression is applied to avoid thick edges and instead generate one pixel wide edges. Sub pixel estimation is applied to improve the accuracy of the edge detection. Only edge pixels that have been successfully matched are displayed. For most application, we recommend using edges as feature type, rather than points.

Figure 3.23: Number of edges extracted and matched was increased by reducing "Feature threshold" from 10 to 5.
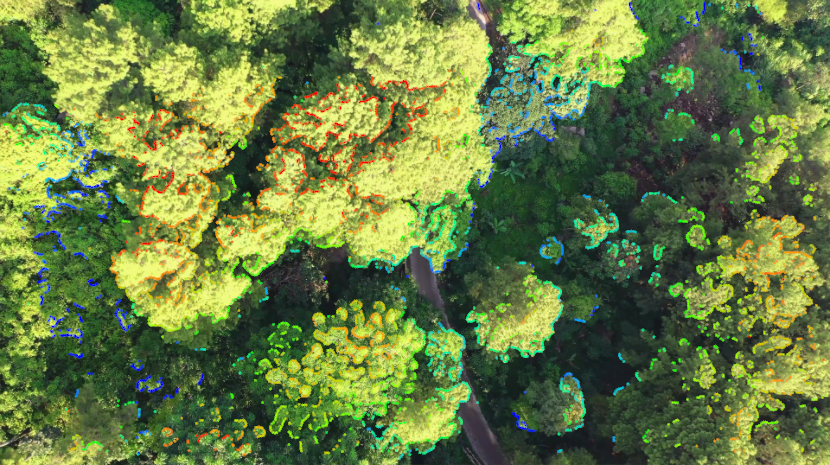
Figure 3.24: Number of edges extracted and matched was decreased by setting "Feature threshold" to 15 instead of 10.
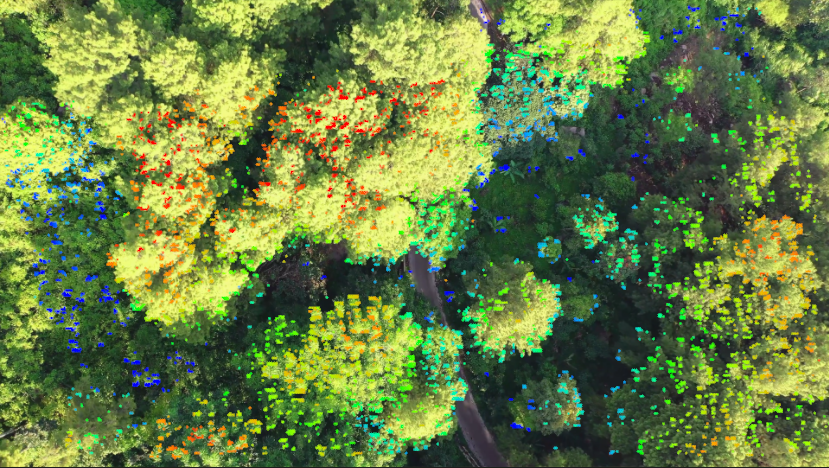
Figure 3.25: Points, currently only full pixel accuracy and without nonmaximum suppression.
Points are identified as being significantly darker or lighter than surrounding pixels. A neighbourhood of 5 pixels is used. Currently, a point that is larger than one pixel may result in multiple point features, since no non-maximum suppression is applied. Furthermore, no sub pixel estimation is done on point features. When non-maximum suppression and sub pixel estimation has been implemented, point matching may be signficantly faster than edge matching. It is included as an option already now for evaluation and to provide an alternative if edge matching fails for a particular data set. To generate approximately the same number of points as edge pixels you should reduce the "Feature threshold" by half.